
Thinking Wave
An exploration of methods to increase drivers’ trust in a semi-autonomous vehicle through real-time visualisations of collaborative driving dynamics

Motivation:
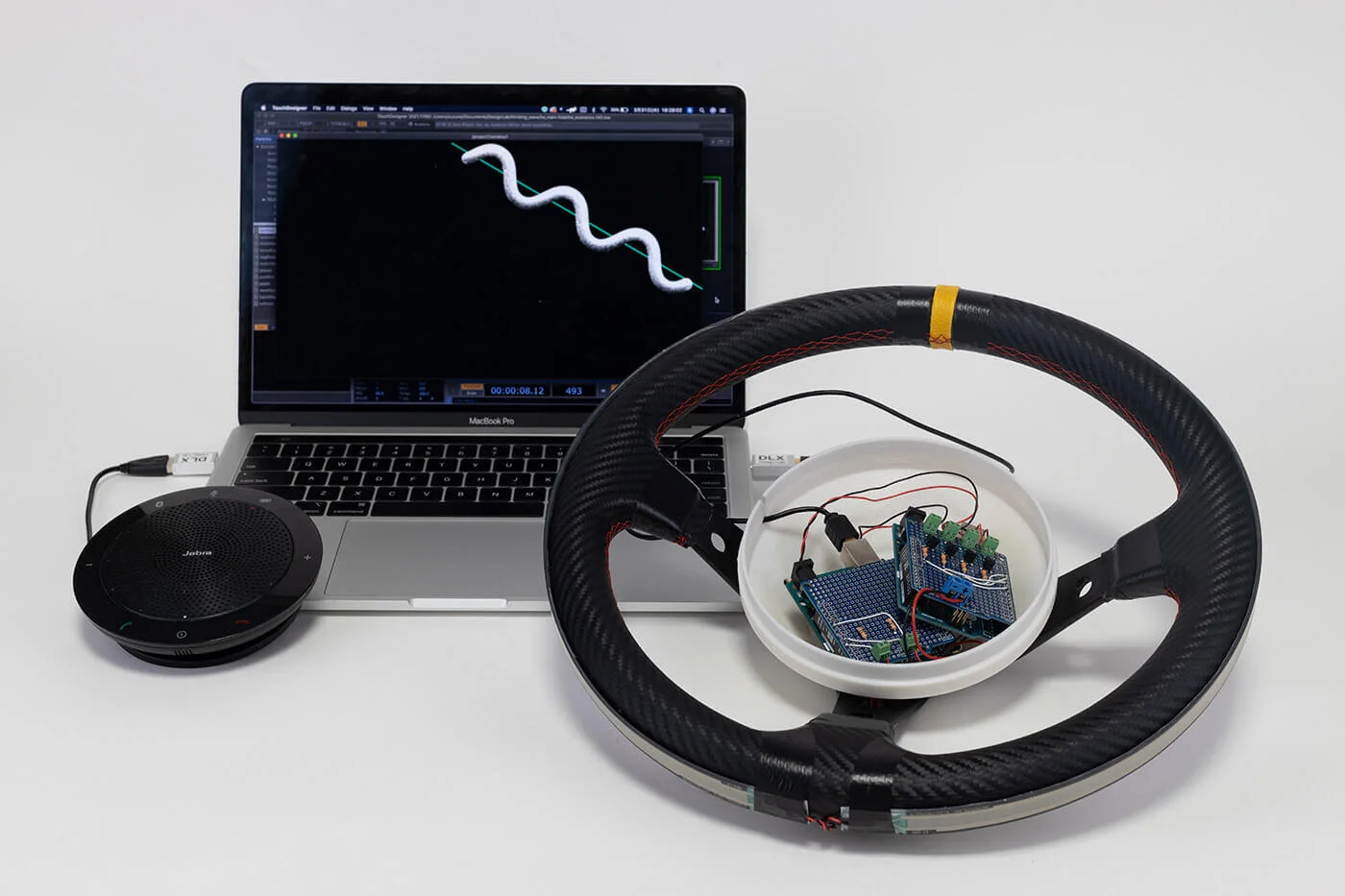
The Thinking Wave is an ongoing development of visualisation concepts showing real-time effort and confidence of semi-autonomous vehicle (AV) systems. Offering drivers access to this information can inform their decision-making, and enable them to handle situations accordingly and take over when necessary.
Two different visualisations have been designed. The first concept, “Tidal”, demonstrates the AV system’s effort by intensifying activity via a simple graphic which fluctuates in speed and frequency.
The second concept, “Tandem”, displays the effort of the AV system as well as the handling dynamic and the shared responsibility between the driver and the vehicle system. Working collaboratively with mobility research teams at the University of Tokyo, we are prototyping and refining the Thinking Wave and its embodiments as we work towards building a testable version integrated into a driving simulator.
The development of the Thinking Wave aims to calibrate trust by increasing the driver’s knowledge and understanding of the vehicle’s handling capacity. By enabling transparent communication of the AV system’s capacity, we hope to empower drivers who are sceptical about AVs and keep overconfident drivers alert to the potential need for an emergency take-over situation, in order to create a safer autonomous driving experience.
Project description:
This project is a prototype for an experimental HMI, planned to be implemented on Navia autonomous shuttles in future stages of the experiment.
The hypothesis is that utilising the vehicle floor as an interface can assist in calibrating trust and in facilitating the implementation and rolling out of AVs. Given that trust is an important factor in the acceptance of autonomous systems, and influences user behaviour (Lee and See, 2004, Garcia 2015), a supportive user interface is essential – especially in the transition phase towards automated driving, where the “driver” needs to give up control in favor of an unknown feature (Haeuslschmid 2017). This project does not focus on the driver, but on the passengers’ response to autonomous driving, and this is where its significance and innovation lie.
Project Ripple’s starting point is a solitary passenger who boards an AV alone, and needs effective communication from the vehicle. Mapping was a key stage of the process – the team focused on what is lost in terms of human interaction in the transition to driverless vehicles. Drawing on ideation sessions and observations, the team concluded that the following aspects will be impacted by the transition to AVs and the absence of a human driver:
A sense of familiarity, a sense of trust and being in control
A sense of authority and responsibility inside the vehicle
A sense of security and coherence
The needs the team tried to answer result from the driver’s absence: the passenger has no-one to confirm that he has boarded and alighted safely, or to ask about journey information or the progress of the commute, to enquire about payment or ask for directions; no-one notify them about delays and their reasons, provide guidance during emergency situations and a wide range of other information. The project proposes that by providing such information via a new method of interaction, the floor of the vehicle can instil confidence and orientation and thereby build trust in the passengers.
The team then started defining the design challenges and validating them through prototyping. We focused on three scenarios to present and test an interaction system that answers the above needs and promotes desired values:
The vehicle acknowledges the presence of the passenger and gives information to the passengers that is also meant to build and calibrate trust.
The vehicle itself plays a part in the communication between passengers and a driverless vehicle. It becomes a mediator and a platform to communicate with passengers and can make other platforms for interaction redundant.
Each scenario focuses on a different phase of the passenger journey and is meant to evaluate the amount of trust lost or gained at this phase.
Conclusion:
The preliminary motivation was to assess the role of the driver in public transportation and to identify what will happen once the driver is omitted from the vehicle and replaced by a complex robotic system which will soon take charge of the driving.
Team members:
Yuri Klebanov
Reserch Associate @ U-Tokyo DLX Design Lab
Romi Mikulinsky
Head of M.Des. program, Industrial Design at Bezalel Academy of Arts and Design
Tom Reznikov
Interaction designer, head of design @ Riskified
Miles Pennington
Professor of Design Led Innovation at University of Tokyo, Institute of Industrial Science
Suda Yoshihiro
Hiraoka Toshihiro
Kanzaki Shoichi
DLX Design Lab - Graduate Student